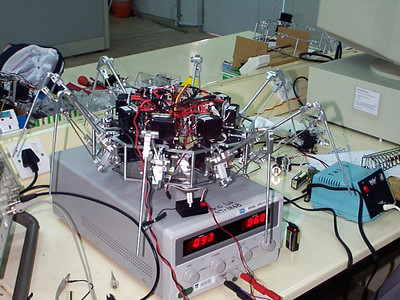
This project involved programming an 8-legged, 24 DOF, Mechatronic Robot to walk in various gaits to achieve translational and rotational movement, via remote control. It was able to move back and forth, sideways, and make turns, at various speeds. See reports from 1999 of this work.


Publication
Lim, B. Y., Paramasivan, K., Nickols, F. M. J. 1999. Control of an 8-Legged, 24 DOF, Mechatronic Robot, Proc of TERP Congress ’99, Nov 1999. ![]()

Leave a Reply